Whole-body control of an aerial manipulator with reinforcement learning
Controlling a flying arm to perform pose-control and manipulation.
This was my master thesis (MSc Robotics) project spanning 9 months.
Media
Short experiment videos here.
Paper arXiv link.
Thesis document here.
Overview
Model-based methods of control need an accurate transition model and aren’t robust to disturbances from the environment, especially when contact is involved. RL is a promising alternative, where the transition / dynamics model is learned by simulating interactions, including disturbances and model mismatch. The goal was to develop a control architecture using RL, to control the end-effector pose of an aerial manipulator, and demonstrating robustness via real-world experiments.
| Pose control with 140 g payload | Pushing a 590 g box |
|---|---|
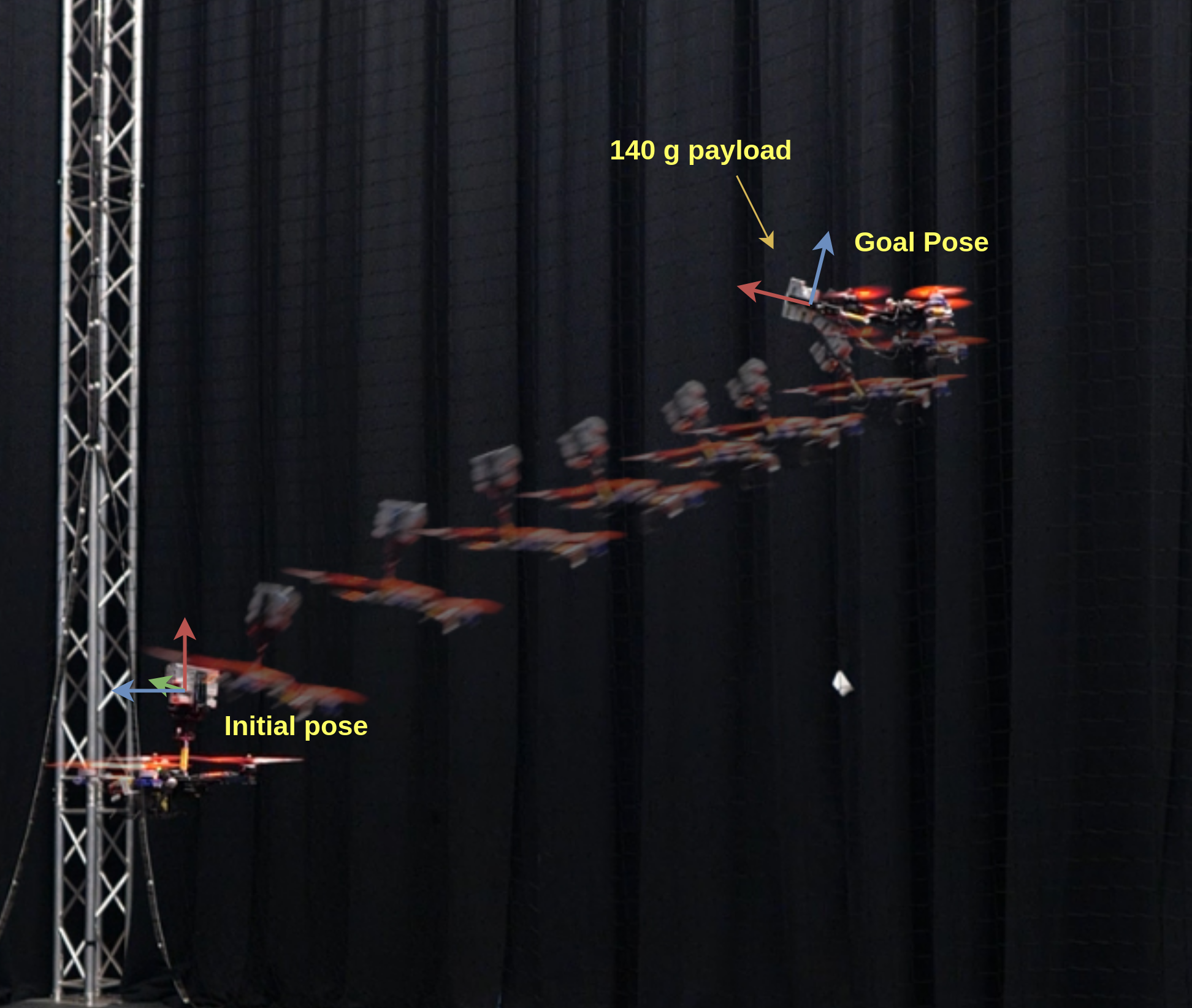 | 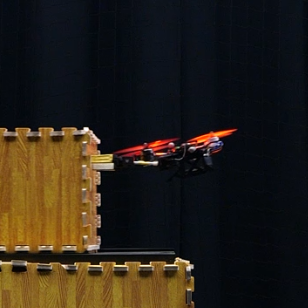 |
Contributions
Developed a hybrid control architecture, using a PPO-based trained policy for high level commands followed by traditional controllers for low-level tracking, balancing the tradeoff between control authority and sim-to-real transfer.
Developed a high fidelity simulation environment in NVIDIA Isaac Lab for training, by modelling low-level controllers, drone physics, actuators behavior and filters.
Developed a training regime that involved iterating on reward functions, observation/action space, utilizing techniques like domain randomization and curriculum learning, to successfully perform end-effector pose control with minimal sim-to-real gap.
For hardware (powered by Raspberry Pi 5), wrote the control pipeline with (Agilicious) flight controller for drone control (RL + Acceleration/Attitude + INDI) and interfaces with dynamixel actuators for arm control (RL + PID). The policy used ONNX runtime + C++ for inference.
Results
Successfully trained and deployed in real-world (video links above).
The policy is able to accurately (5.3 cm, 8.8 ° error) perform end-effector pose control achieving 6-DoF commanded poses, with inferece time of 0.18 ms.
Can successfully track poses, while carrying payloads upto 140 g.
Same policy can handle external disturbances and push a box weighing 590 g.
Languages and tools used: C++, Python, ROS, Isaac Sim, Gazebo
Working on this was incredibly rewarding.