Projects

Whole-body control of an aerial manipulator with reinforcement learning
Controlling a flying arm to perform pose-control and manipulation.
SDFGen: A library to generate Signed Distance Fields
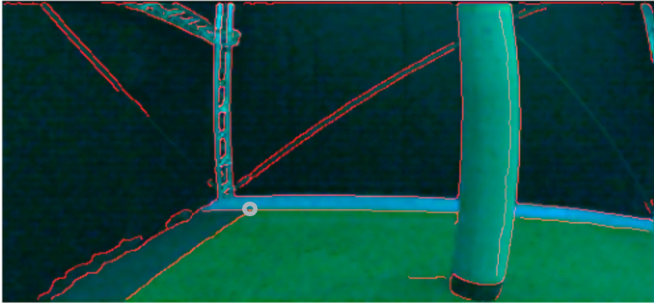
Robotics intern @ Mainblades (3 months)
Fleet Autonomy for Lely Discovery Collector
Controlling a fleet of mobile manipulators for area coverage and manure detection.
Vision based obstacle avoidance for MAV
Bechmarking obstacle avoidance methods for Parrot Bepop drone.
Multi-object tracking
Pedestrian tracking using LiDAR and camera sensors.
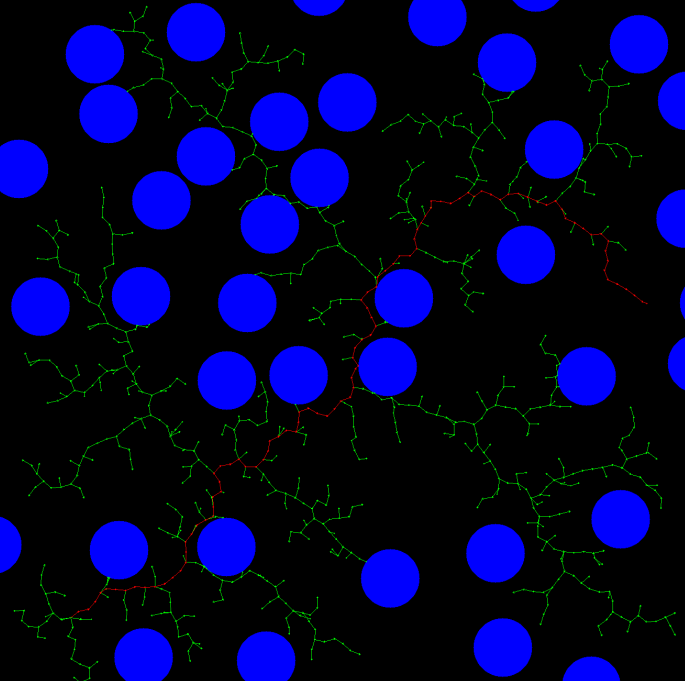
Multi-agent search-and-rescue system
Multi-drone path planning with global / local planners for search and rescue simulation.