SDFGen: A library to generate Signed Distance Fields
Robotics intern @ Mainblades (3 months)
Overview
Mainblades does aircraft inspections autonomously with drones. During my internship, I built a library (based on Voxfield) to represent the obstacle map with SDFs (Signed Distance Fields), this enables using gradient based path planning algorithms, generating smoother trajectories.
| Point cloud reconstruction | SDF from point cloud |
|---|---|
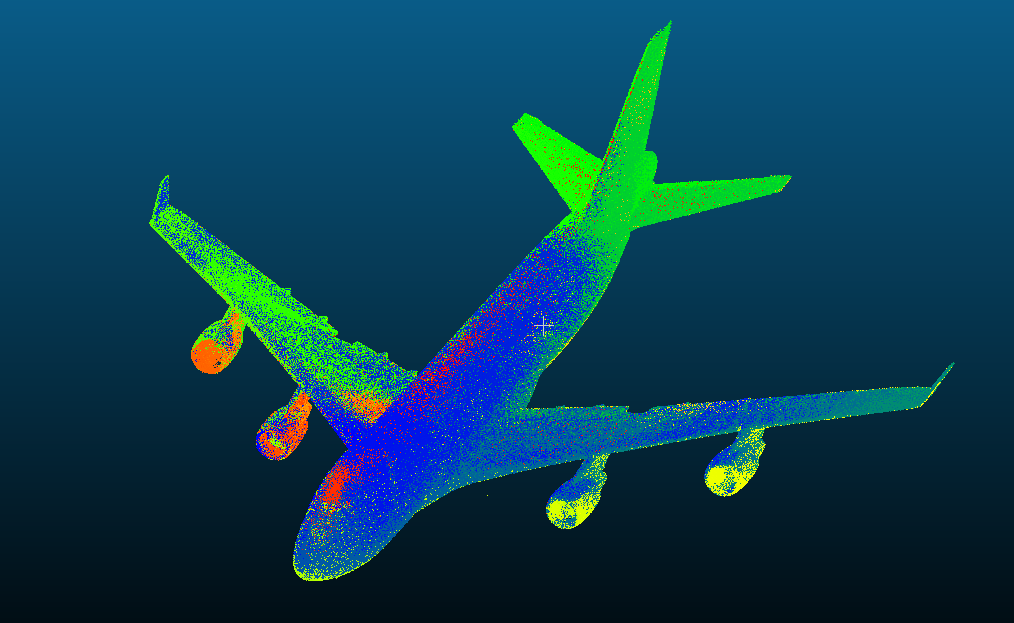 | 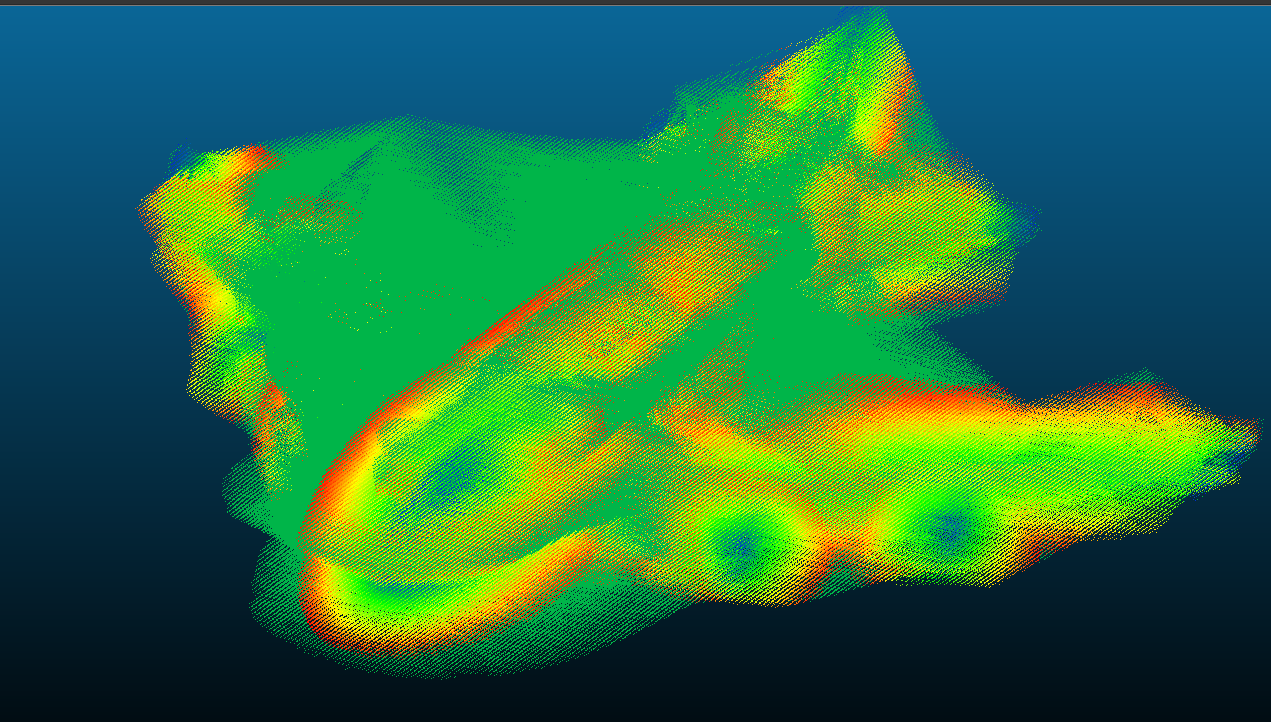 |
Contributions
Built SDFGen, to convert LiDAR point clouds and reconstructed aircraft models into SDFs (signed distance fields) maps.
Developed sdfgen_live (ROS) to integrate live LiDAR/rosbag data during flight and publish an SDF map for online planners while supporting initialization from prior maps for faster startup.
Validated with static reconstructed aircraft models (B747/B777), flight rosbags, and hardware-in-the-loop on a DJI M300 and achieved 2 Hz SDF generation onboard.
Languages and tools used: C++, ROS