Multi-agent search-and-rescue system
Multi-drone path planning with global / local planners for search and rescue simulation.
Overview
This projects simulates rescue drones cooperatively scanning unknown forests. A BFS global planner divides the area amongst drones followed by RRT* local planner to avoid obstacles. We simulate 3 drones covering 900m² and 200 trees in PyBullet.
| 2D Local path plan with RRT* |
|---|
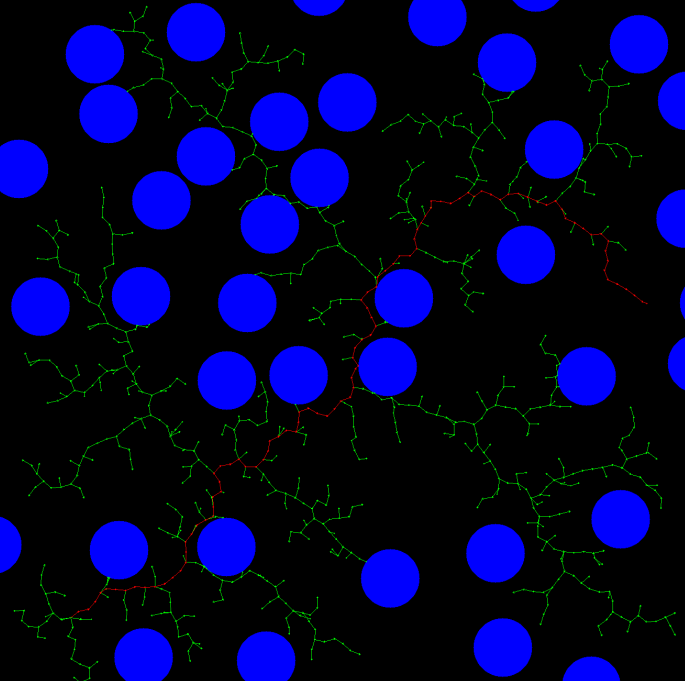 |
Contributions
Developed a simulation environment using PyBullet to simulate drones exploring and navigating a forest.
A global planner, divides the area amongst the available drones, creates zones to explore and a local planner navigates around obstacles (trees), with RRT*.
Compared planning times for increasing map sizes and found an exponential increase, motivating the use of smaller local maps.
Languages and tools used: Python, PyBullet