Vision based obstacle avoidance for MAV
Bechmarking obstacle avoidance methods for Parrot Bepop drone.
Overview
Enable autonomous obstacle avoidance for a Parrot Bebop MAV in TU Delft’s Cyberzoo using monocular vision under tight onboard compute and variable lighting/scene conditions. The system must pick safe headings and fly reliably around pillars, trees, carpets, and “mysterious” obstacles.
| Canny edge algorithm | Monodepth |
|---|---|
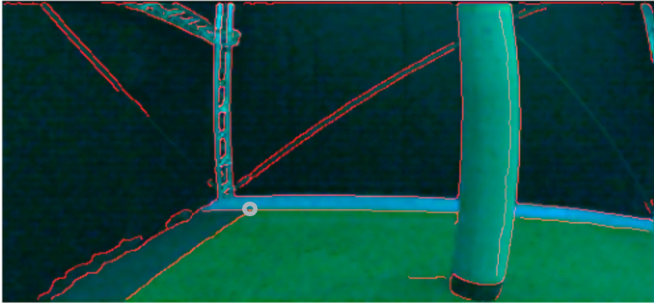 | 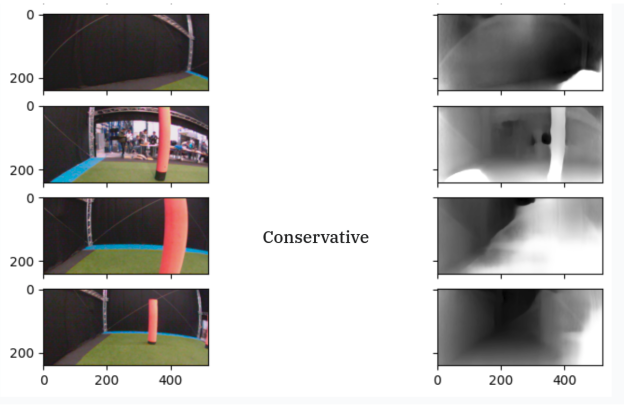 |
Contributions
Benchmarked monocular obstacle-avoidance methods - optic flow, edge detection, monocular depth and color segmentation on Parrot Bebop drone.
Implemented floor/obstacle segmentation with a simple state machine and achieved stable avoidance in controlled flights.
Results
Worked in practice: The colour/floor method successfully avoided most Cyberzoo obstacles, while edge/optic-flow and ML/depth variants were constrained by sensitivity, data/compute, or deployment limits.
Limits & insights: Obstacles sharing floor colour reduce detectability, flying lower leverages ground effect and improved reliability and overall compute cost is low for the colour method, enabling onboard execution.
Languages and tools used: C, Python
In the end, the simplest method worked the best.