I’m an engineer with hands-on experience in perception, motion planning and learning-based control of mobile manipulators and drones. Previously, I worked as a Data Engineer. Feel free to browse through my projects (non-exhaustive) and work.
Interests: Robotics Software Engineering (perception, planning, system design), Learning-based control.
Reach me: sdesh.work@gmail.com
highlights

Whole-body control of an aerial manipulator with reinforcement learning
Controlling a flying arm to perform pose-control and manipulation.
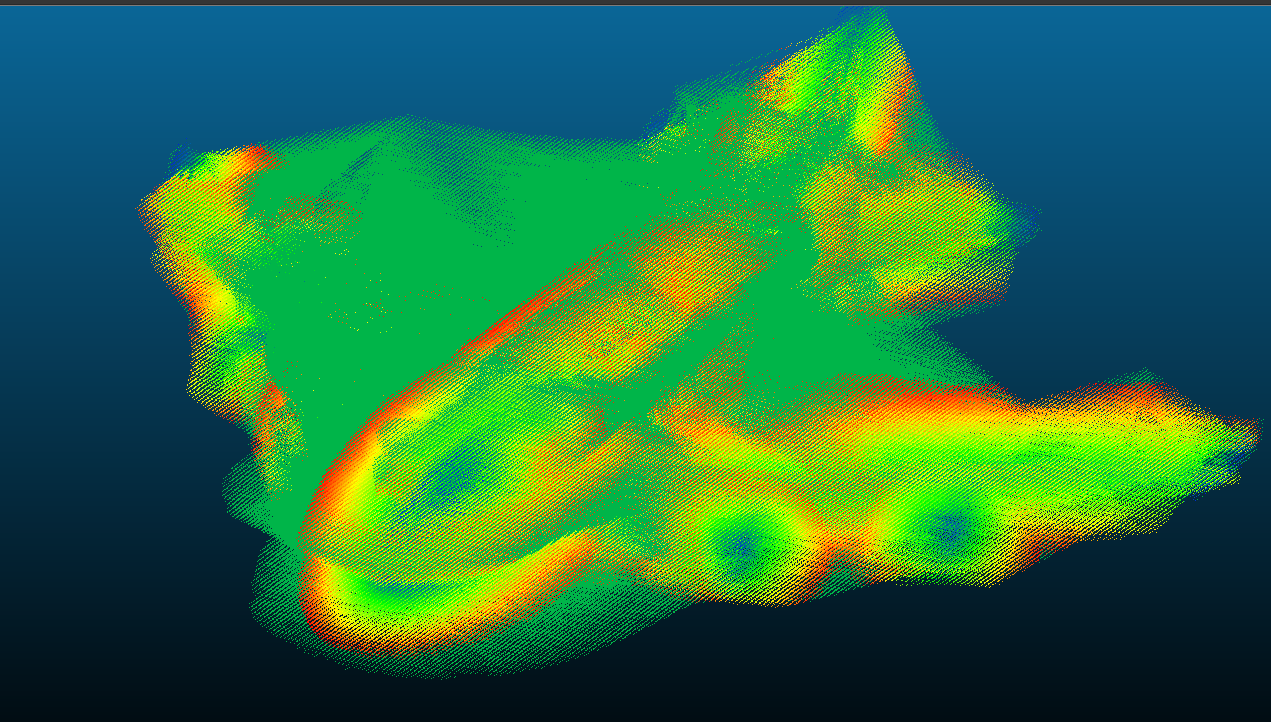
SDFGen: A library to generate Signed Distance Fields
Robotics intern @ Mainblades (3 months)
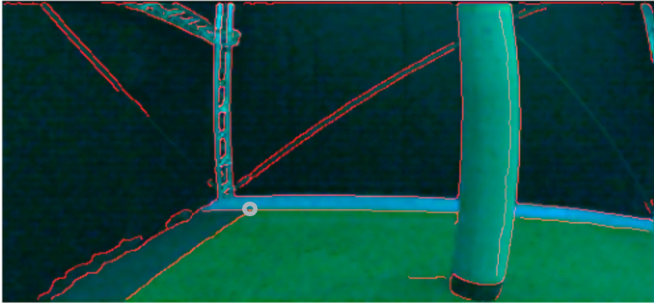
Vision based obstacle avoidance for MAV
Bechmarking obstacle avoidance methods for Parrot Bepop drone.